일단 필요한 모듈들 import 해주기 !
import cv2
import numpy as np
from matplotlib import pyplot as plt
YOLO 로드
net = cv2.dnn.readNet("yolov3.weights", "yolov3.cfg")
classes = []
with open("coco.names", "rt",encoding = "UTF8") as f:
classes = [line.strip() for line in f.readlines()]
layer_names = net.getLayerNames()
output_layers = [layer_names[i-1] for i in net.getUnconnectedOutLayers()]
colors = np.random.uniform(0, 255, size=(len(classes), 3))여기서 필요한 파일들은 아래 글에 나와있다 !
[DARKNET] 다크넷으로 YOLOV3 돌리는 법
1. 필요한 파일 다운 name cfg weight https://pjreddie.com/darknet/yolo/ YOLO: Real-Time Object Detection YOLO: Real-Time Object Detection You only look once (YOLO) is a state-of-the-art, real-time ob..
hjkim5004.tistory.com
이미지 로드
img = cv2.imread("images/teddy_bear.jpg")
img = cv2.resize(img, None, fx=0.4, fy=0.4)
height, width, channels = img.shape
detect ( + 이미지 blob으로 )
blob = cv2.dnn.blobFromImage(img, 0.00392, (416, 416), (0, 0, 0), True, crop=True)
net.setInput(blob)
outs = net.forward(output_layers)
class_ids = []
confidences = []
boxes = []
for out in outs:
for detection in out:
scores = detection[5:]
class_id = np.argmax(scores)
if scores[class_id] != 0:
print(class_id)
print(scores[class_id])
confidence = scores[class_id]
if confidence > 0.6:
center_x = int(detection[0] * width)
center_y = int(detection[1] * height)
#print(center_x,center_y)
w = abs(int(detection[2] * width))
h = abs(int(detection[3] * height))
x = abs(int(center_x - w / 2))
y = abs(int(center_y - h / 2))
boxes.append([x, y, w, h])
confidences.append(float(confidence))
class_ids.append(class_id)
non maximum suppression
class_list = list(set(class_ids))
idxx = []
indexes=[]
for i in range(len(class_list)):
max_v=0
for j in range(len(class_ids)):
if class_ids[j] == class_list[i]:
if max_v < confidences[j]:
max_v = confidences[j]
idxx.append(j)
indexes.append(idxx[len(idxx)-1])
print(class_ids)ㄴ 한 object에 대해 여러 바운딩 박스가 생기면 그 중 정확도가 제일 높은 것을 제외한 모든 중복 바운딩 박스 없애기 !
노이즈 제거
indexes = cv2.dnn.NMSBoxes(boxes, confidences, 0.5, 0.4)
class name, bounding box, 좌표 출력
font = cv2.FONT_HERSHEY_PLAIN
det_foods = []
for i in range(len(boxes)):
if i in indexes:
x, y, w, h = boxes[i]
class_name = classes[class_ids[i]]
print(class_name)
print(confidences[i])
label = f"{class_name} {boxes[i]}"
det_foods.append(label)
color = colors[i]
print(x,y,x+w,y+h)
nx = (x + w) / width
ny = (y + h) / height
if nx > 1:
nx = 1
if ny > 1:
ny =1
cv2.rectangle(img, (x, y), (x + w, y + h), color, 2)
print(x/width,y/height,nx,ny)
cv2.rectangle(img, (x - 1, y), (x + len(class_name)*13, y-12), color, -1)
cv2.putText(img, class_name, (x, y - 4), cv2.FONT_HERSHEY_COMPLEX_SMALL, 0.5, (0, 0, 0), 1,cv2.LINE_AA)
b,g,r = cv2.split(img)
image2 = cv2.merge([r,g,b])
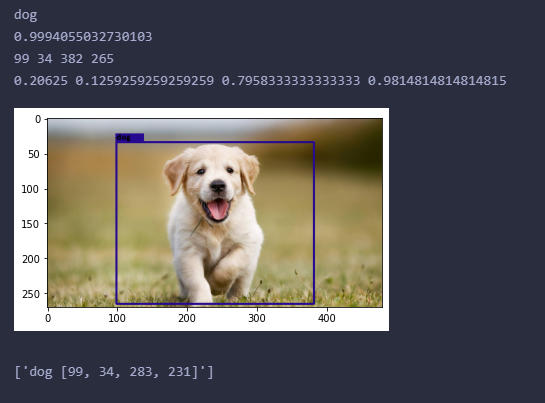
plt.imshow(image2)
#imShow(img)
plt.show()
print(det_foods)
tiny가 아닌 yolov3로 돌렸을 때 !

tiny로 돌렸을 때 !

tiny가 일반 yolov3보다 정확도도 꽤 낮고 인식을 못 하는 경우도 있었다

's t u d y . . 🍧 > AI 앤 ML 앤 DL' 카테고리의 다른 글
| [YOLOv5] Custom Dataset으로 Pothole detection (0) | 2022.10.07 |
|---|---|
| [CNN] Custom Dataset으로 Pothole detection (1) | 2022.10.05 |
| [DARKNET] 다크넷으로 YOLOV3 돌리는 법 (0) | 2022.10.02 |
| [YOLOv3] Object detection (1) | 2022.09.30 |
| [OpenCV] 실시간 영상처리 (0) | 2022.09.28 |